Opis rada dizajna VPR 21
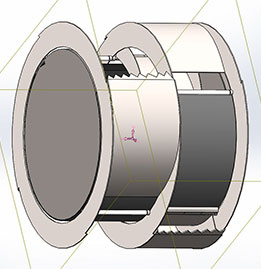
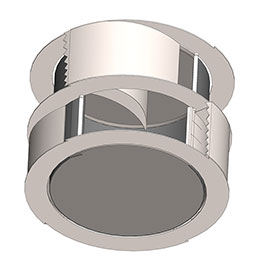
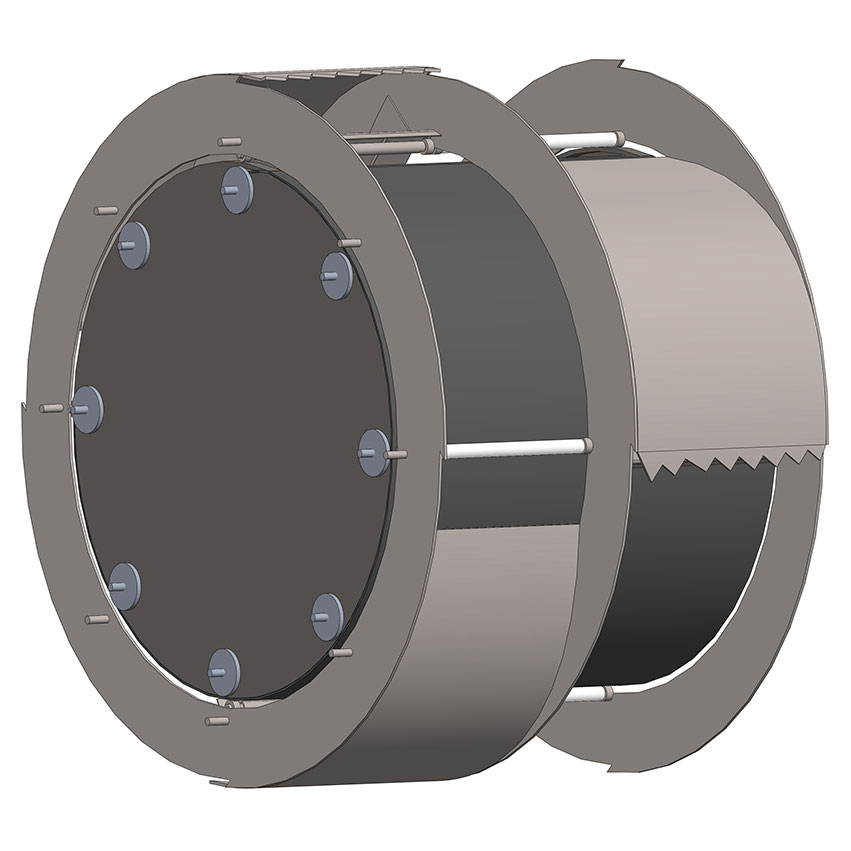
Materijal: lepljena karbonsko vlakna, zavareni lim titanijuma, modifikovani kuglični ležajevi 623ZZ
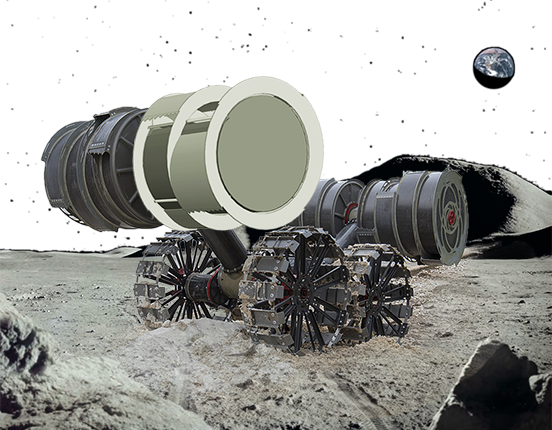
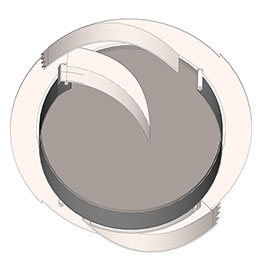
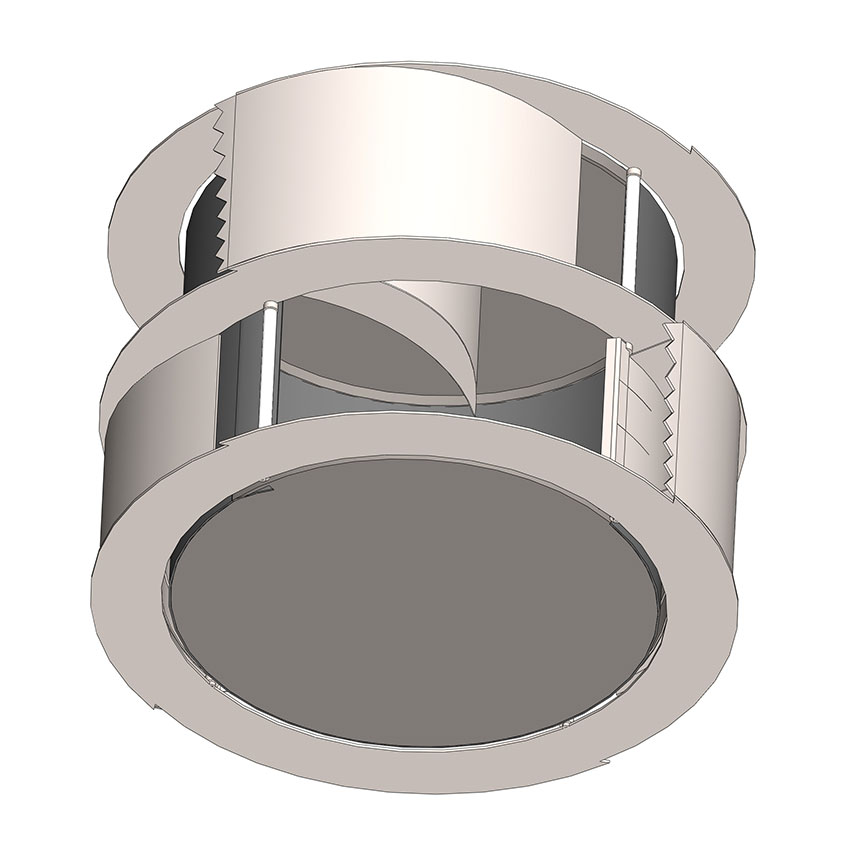
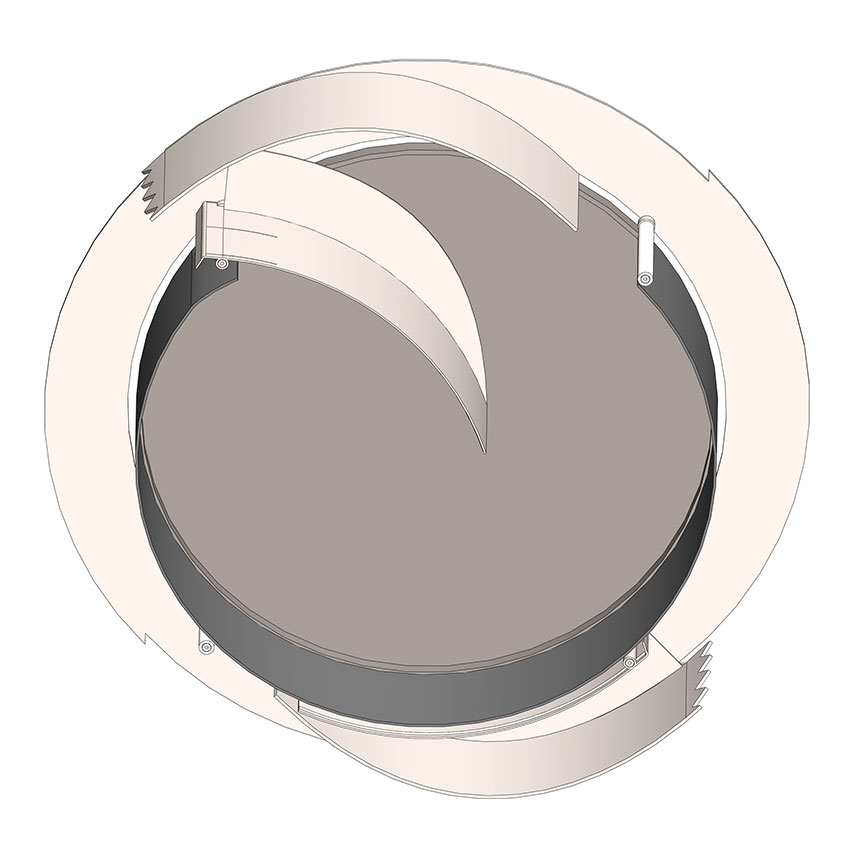
Rotacione kašike i kofa za sakupljanje regolita su odvojeno povezane s malo izmenjenim reduktorom na postojećem Rassor robotu, pa se mogu rotirati zajedno ili nezavisno, s tim što se kašike ne mogu rotirati u suprotnom smeru od kazaljki na satu ako se kofa ne rotira istovremeno i istosmerno.
Utovar: U kontaktu s regolitom na tlu, lopatice se okreću i pune kofu.
Na vrhu se zatim zahvaljujući sili gravitacije rotiraju i ruda se istovaruje u kofu postavljenu uspravno, istovremeno odglavljujući veći kamen na ulazu kašike.
Po završetku pražnjenja lopatica se podiže i zatvara udarajući u spoljni zid rotirajućih kašika, stvarajući tako vibracije koje čiste rasuti regolit.
Istovar: Rotacione kašike i kofa se okreću istovremeno i zaustavljaju kad se kofa okrene nadole, kada počinje istovar. Daljim rotiranjem kašika za 90 stepeni sav regolit će se istovariti.
|
NASA (RASSOR) konkurs rotacionog kopača |
Zahtev kon. │ |
VPR 21 dizajn |
1 . |
Maksimalna masa sklopa kašika: |
≤ 5000 g |
= 4997 g |
2 . |
Maksimalan spoljni prečnik sklopa kašika: |
≤ 450 mm |
= 450 mm |
3 . |
Maksimalna dužina sklopa kašika: |
≤ 360 mm |
= 300 mm |
4 . |
Minimalna zapremina iskopanog regolita: |
≥ 17,6 l |
= 24,09 l |
5 . |
Maksimalna širina kašike koja kopa u bilo kom momentu: |
≤ 175 mm |
= 147 mm |
6 . |
Procenat popunjenosti zapremine dizajna regolitom: |
≥ 50 % |
= 50.5 % |
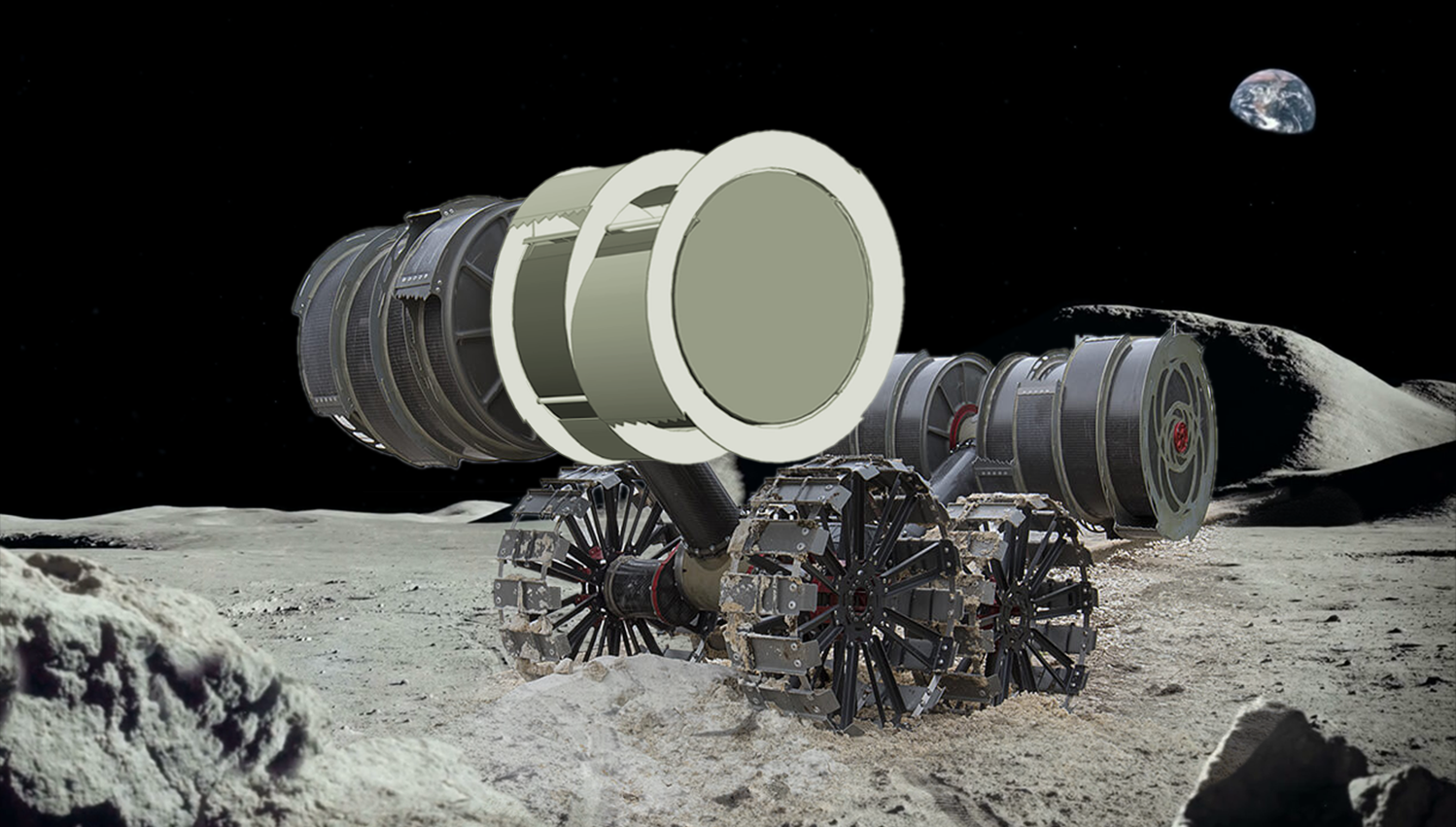
NASA Napredni površinski kopački robotski sistem za rudarenje regolita (RASSOR) dizajn konkurs
Kopanje na Mesecu je težak posao za robota. On mora da bude u stanju da sakuplja i pomera lunarno tle i regolit bez rasipanja i podizanja prašine oko radnog mesta. NASA traži od javnosti da pomogne u projektovanju nove rotacione bubnja/kašike za kopanje, dela robota koji iskopava, skladišti i bez prosipanja transportuje regolit do mesta na kom se istovaruje. Po završetku konkursa dizajnerske prijave će biti ocenjene po više kriterijuma, među kojima su i procenat popunjenosti zapremine regolitom, širina kašike, masa kompletnog sklopa, prečnik, dužina i zapremina iskopanog regolita.
Objavila: NASA



{kind=link}
{kind=link}
{kind=link}
{kind=link}