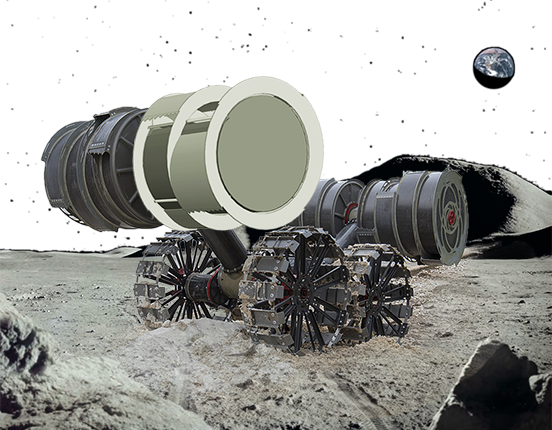
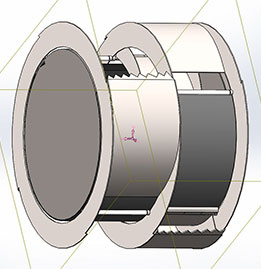
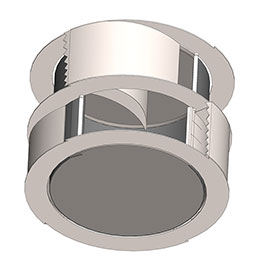
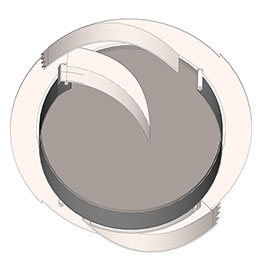
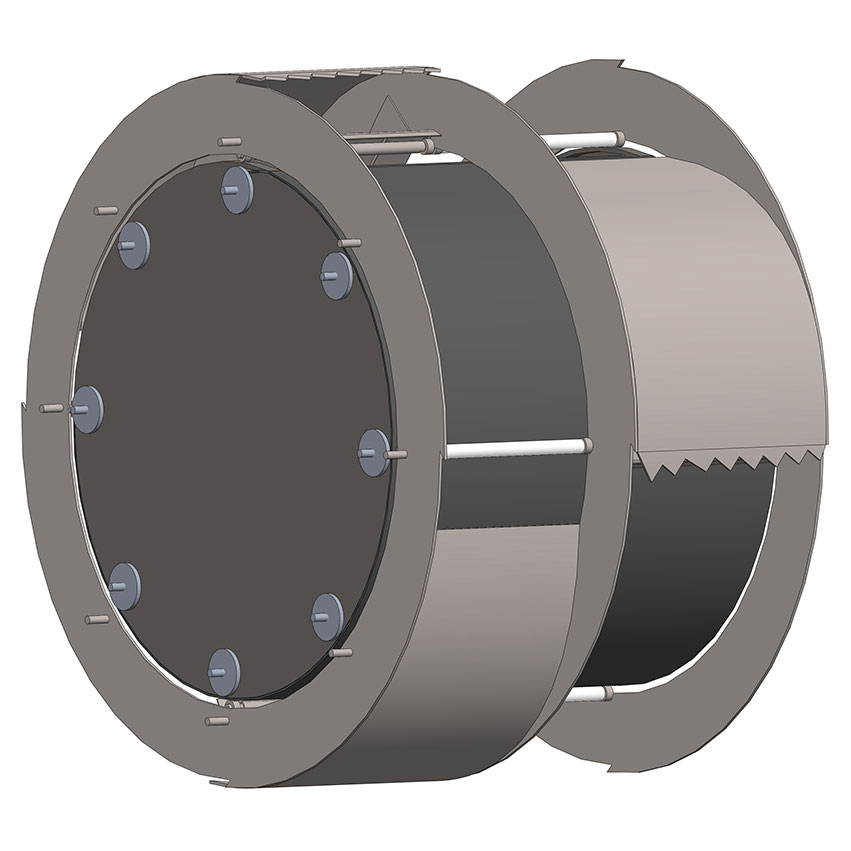
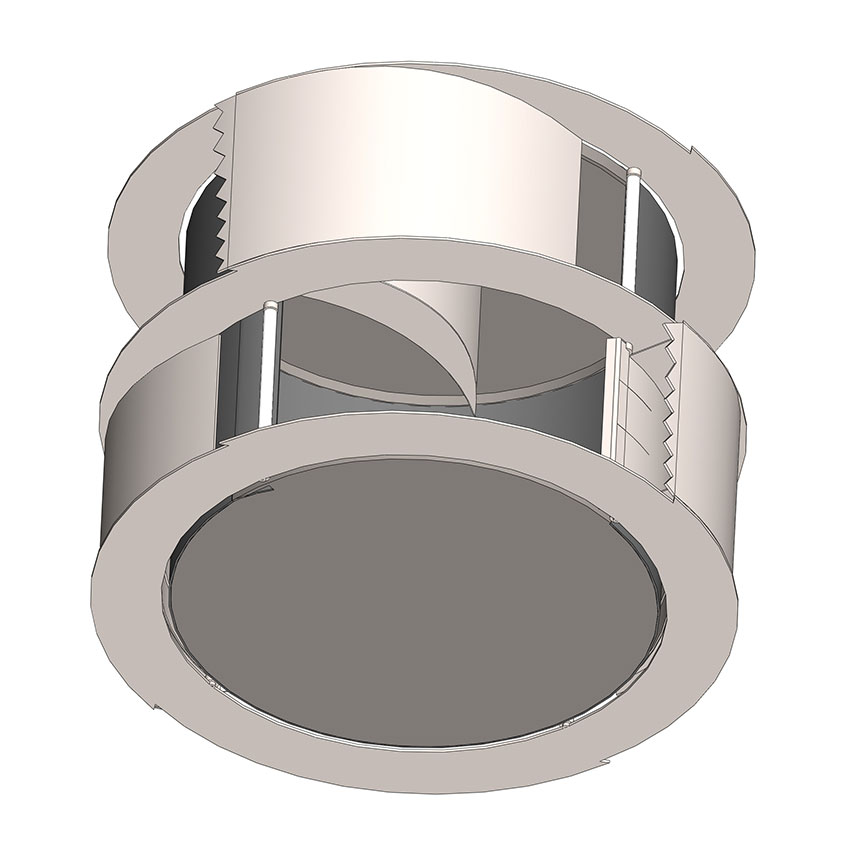
How VPR 21 design works
Materials: glued carbon fiber, welded titanium sheets, modified 623ZZ ball bearings
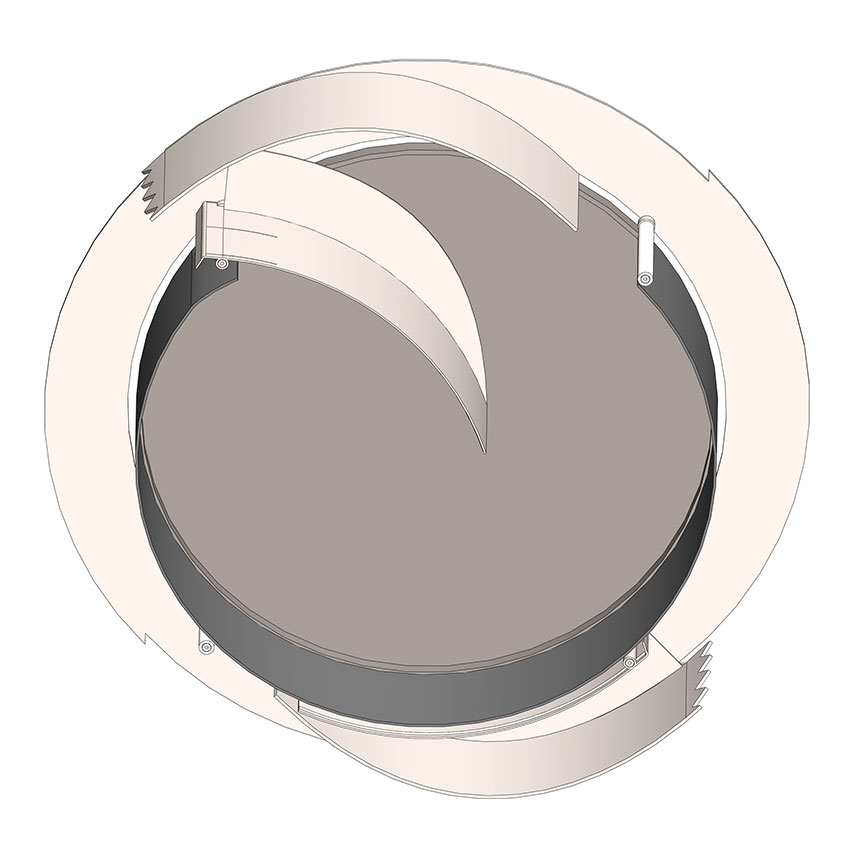
Bucket drum and scoops separately connected to slightly modified arm gearbox on existing Rassor. In such a way, that drum and scoops can rotate together or independently, but cannot rotate scoops in CCW direction if drum is not rotated with it.
Bucket loading: In contact with regolith, bucket inner drum with opening position on top, scoops are rotating and filling on the bottom, then lifting it and unloading in the bucket on top side.
On the top, filled scoop rotated by gravity, will unload regolith in bucket and in same time unjammed bigger rock on the scoop entering.
On the filling exiting position, lifted scoop by bucket edge will close by hitting outer wall of rotating bucket blades assembly creating vibrations that will clean loose regolith.
Bucket unloading: Bucket drum and scoops are rotating at the same time and stopping by positioning bucket opening down. Regolith will start to unload, by rotating bucket blades assembly for 90 degrees all regolith will be unloaded.
|
NASA (RASSOR) Bucket Drum Design Challenge |
Requirements │ |
Design VPR 21 |
1 . |
Maximum bucket drum mass: |
≤ 5000 g |
= 4997 g |
2 . |
Maximum bucket drum diameter: |
≤ 450 mm |
= 450 mm |
3 . |
Maximum bucket drum length: |
≤ 360 mm |
= 300 mm |
4 . |
Minimum volume of regolith captured: |
≥ 17,6 l |
= 24,09 l |
5 . |
Maximum total scoops width engaged at any given time : |
≤ 175 mm |
= 147 mm |
6 . |
Design fill ratio higher than: |
≥ 50 % |
= 50.5 % |
NASA Regolith Advanced Surface Systems Operations Robot (RASSOR) Bucket Drum Design Challenge
Digging on the Moon is a hard job for a robot. It has to be able to collect and move lunar soil, or regolith, without dropping any or kicking up Moon dust around the operation. NASA is asking the public to help design a new bucket drum, the portion of the robot that captures the regolith and keeps it from falling out. The regolith can then be transported to a designated location where reverse rotation of the drum allows it to fall back out. At the end of the competition, the design entries will be judged on a set of criteria, including specific fill ratio, width of the scoops, bucket drum mass, diameter and length, and volume of regolith captured.
Posted by: NASA



{kind=link}
{kind=link}
{kind=link}
{kind=link}